

無軌道自由移動全方位走行ロボット
当社の無軌道全方位走行ロボットは、大型構造部品、圧力容器、貯蔵タンクの全方位(1G-6G)溶接に開発されている自動溶接システムです。石油、化学、鉄道輸送、造船、原子力工学、エネルギー、電力、建設などの産業の溶接工程を簡単かつ高効率にさせる新生代溶接ロボットです。無軌道設計とレーザー視覚追跡システムにより、継ぎ目を高精度で追跡しながら溶接作業を柔軟に移動できて、高い溶接効率と優れた溶接品質が保証されます。手動溶接や現在の固定溶接ロボットと比較して、当社の溶接ソリューションは活動半径とガイドレールに制限されず、大型プロジェクトの溶接要件を完全に満たすことができます。
当社のロボット溶接システムについて何か質問がありますか。
是非お気軽にお問い合わせください。
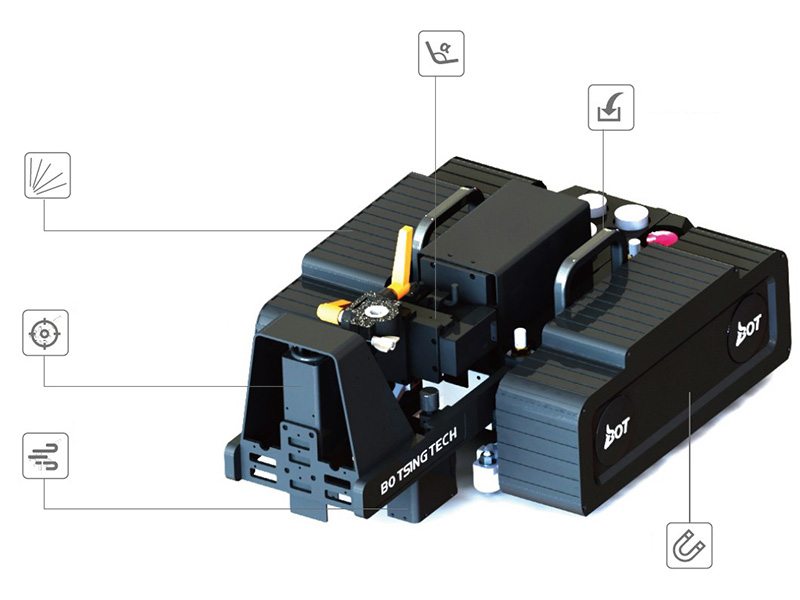
 履帯
履帯 溶接継ぎ目のレーザービジョン追跡システム
溶接継ぎ目のレーザービジョン追跡システム 防風シールド
防風シールド 多自由度溶接スイングシステム
多自由度溶接スイングシステム 負荷装置
負荷装置 永久磁石の磁気吸着移動機構
永久磁石の磁気吸着移動機構
- 3日間の専門トレーニングの後、溶接アマチュアは1台以上のロボットを操作できます。 操作は簡単で、人件費を削減できます。
- ガイドトラックやプログラミングをセットアップする必要はありません。
- 高安定性と信頼性の溶接品質、再加工を大幅に削減します。
- 低周波パルスとダブルパルス溶接集成したプログラムのため、沈着効率は高い、溶接効率を大幅に向上させます。
- 溶接手順は保存できます。
- 高い負荷能力、柔軟な動き、中型および大型の構造部品で自由に移動と回転が可能。
- 障害物を越えられる。
- 溶融池観察カメラを履帯に設置し、キャビネットによる遠隔制御を実現。
- 耐久性に優れた頑丈なデザイン
- 落下防止警告付きの4つの超音波センサーを装備;



- 溶接物:貯蔵タンク、球形タンク、船舶、原子力インフラストラクチャ、およびその他の大型構造部品
- 溶接材料:炭素鋼および合金鋼
- 溝型溶接継手:V、X、U、J
- 溶接位置:1G、2G、3G、4G、5G、6G
- 金属の厚さ:6mm〜100mm
自由移動溶接ロボット、制御キャビネット、電源、ワイヤ送給装置、水冷ユニットなど、すべてのシステムコンポーネントが転送トロリーに取り付けられているため、操作と輸送が便利です。
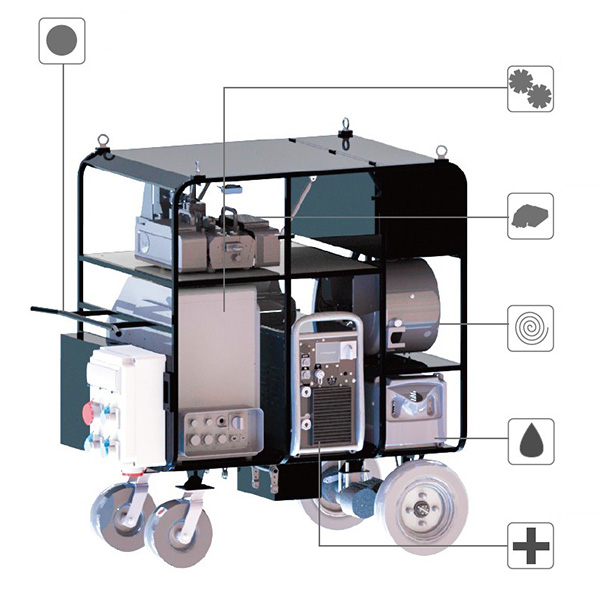
 転送トロリー
転送トロリー 制御キャビネット
制御キャビネット 無軌道自由移動全方位走行ロボット
無軌道自由移動全方位走行ロボット ワイヤ送給装置
ワイヤ送給装置 水冷ユニット
水冷ユニット  電源
電源
- 寸法:1400(L)mmx800mm(W)xl500mm(H)
- ドライブタイプ:電気/手動

制御キャビネットは、モジュラーデザインを採用し、金属製ハウジングと、タッチスクリーンコントロールパネルを備えています。 その高性能CPUはマルチプロセッサシステムを採用しており、履帯とアクチュエーターの高速同期動作を可能にします。 また、制御システムにはサーボコントローラが搭載されており、各軸の駆動と制御は物理インターフェースを介してCPUに接続されています。他の外部デバイスと通信するために、さまざまなタイプの産業機器に接続するインターフェイスを装備しております。
| 寸法 | 580mm (L) x360mm (W) x630mm (H) |
| インターフェース | アナログインターフェース: 4 I/O デジタルインターフェース: 32 I/O |
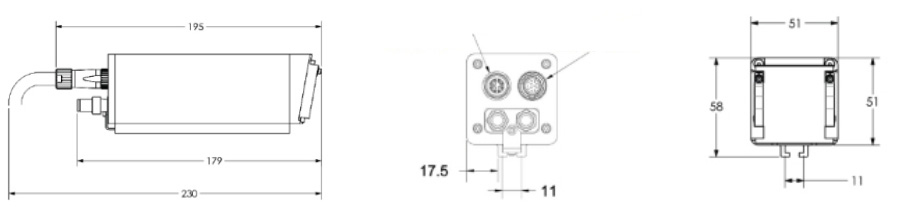
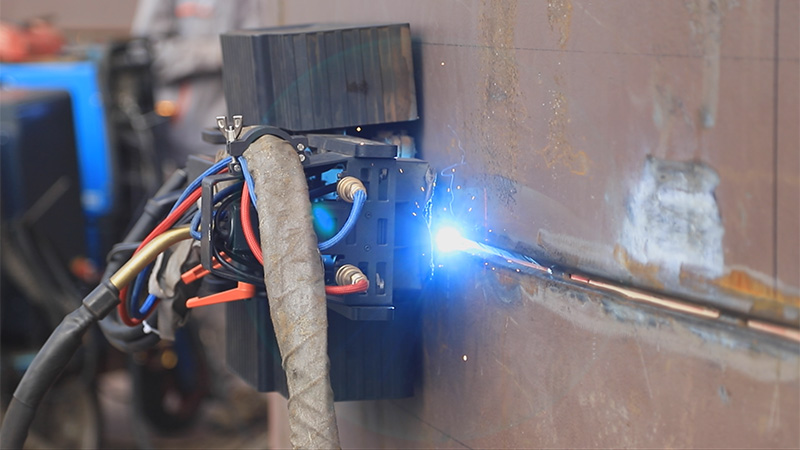
溶融池のカメラの最大観測距離は100mで、それを介して、オープンアーク溶接過程をリモートで観測します。 高度なセンシング技術と精確な電気回路設計により、140 + dBのダイナミックレンジが実現されています。 そのため、溶接トーチ、溶接ワイヤー、および溶接プロセス全体ををはっきりと観察できます。
| イメージセンサー | 2/3" カラー HDR CMOS |
| 解像度 | 1280(H) X1024(V) |
| ピクセルサイズ | 6.8μm X 6.8 μm (8.7mm X 7mm 有効面積) |
| フィルタ | UV+IR |
| センサーシャッター | グローバルまたはローリング |
| ダイナミックレンジ | 140+dB |
| ピクセル深度 | 8ビットbit |
| 露出時間 | 100μs - 100ms |
| 画像制御 | シャッタースピードは露出時間を制御 |
| 寸法 | 85mm (L) X36.5mm(W) X38.5mm (H) (lens excluded) |
| 重量 | 200g (レンズを除く) |
| レンズインターフェース | C マウント |
| 消費電力 | 12Vで6W |

お客様のご要望に応じて溶接電源の配置を行えます。標準バージョンの電源はデジタルシリーズ電源で、200以上のプログラムメモリがあるため、溶接材料、線径、ガスが常に優れた性能レベルに維持しています。
| 溶接電流 | BQT-I-400A | BQT-I-500A | |
| 入力電圧50 / 60hz | 400v(+20%/-20%) | ||
| 入力電流 | 25A | 28.5A | |
| 最大電流での力率 | 0.96 | 0.93 | |
| 最大電流での効率 | 0.89 | 0.89 | |
| デューティサイクル@40℃ | 100% | 420A | 500A |
| 60% | 350A | 450A | |
| デューティサイクル@25℃ | 100% | 420A | 500A |
| 電流範囲 (MIG/MAG) | 15A-420A | 15A-500A | |
| 重量 | 34KG | 40KG | |
| 寸法 | 738mm(L) *273mm(W) *521mm(H) | ||

ワイヤー送給装置のハウジングは金属製なのため、高い耐久性を保証します。 99の溶接プログラムを保存できて、さまざまな溶接用途に対応しております。
| 型番 | DVU W500 |
| 重量 | 16kg |
| 寸法 | 603mm(L)x262mm(W)x446mm(H) |
| ワイヤ送給ロールの数 | 4 |
| 線径 | 0.6 mm-1.6 mm |
| 送り速度 | 0-25 m/min |
| ワイヤーリール直径 | 300mm |
| 製品の重量 | 28.8kg | 最大障害物の横断高さ | 5mm |
| 最大負荷 | 60kg | 最大移動速度 | 5m/min |
| 最小曲面の直径 | ≥3.2m | 溶接の追跡精度 | ±0.5mm |
| 寸法 | 621 mm (L) x394mm (W)x267mm (H) | ||
| 履帯 | キャタピラートラック付き | トーチモーションタイプ | フラット振り子、時計振り子、斜め振り子 | ||||
| 溶接トーチの直線運動範囲 | ±25mm | 突き出し範囲 | ±25mm | ||||
| トーチの移動角度(振り子の動き) | ±30° | トーチ斜角 | ±10° | ||||
| トーチピッチ角 | ±30° | 回転 | 振り回す360° | ||||
| 作業温度 | -10℃~40℃ | 相対湿度 | 90%以下 |
| 制御ケーブル | 標準長さ10m、ご用件に応じて長さを延長できる | ||
現在、大型構造部品の溶接は、主に手動または半自動溶接によって行われています。 手動溶接作業では、高い人件費と管理費用がかかる一方、溶接効率と精度は高くありません。また、大型構造部品の溶接環境は危険な作業環境のため、溶接工の健康と安全面において不安が伴います。半自動溶接は大型構造部品の溶接でも難しい作業とされています。例えば、半自動溶接は軌道に沿い溶接を行い、軌道敷設に制限され、特に湾曲した不規則な表面溶接には不十分です。一方、当社の無軌道無誘導全位置ロボット溶接は溶接の品質と効率を大幅に向上させ、溶接表面と環境を制限せずに目的の工程を完璧に完成させます。
 不安定な溶接品質
不安定な溶接品質 低効率
低効率 高い人件費
高い人件費 じん肺症
じん肺症 安全と健康リスク
安全と健康リスク 高い管理費用
高い管理費用
 軌道敷設が必要
軌道敷設が必要 不規則な継ぎ目、特に曲面の溶接には適用されない
不規則な継ぎ目、特に曲面の溶接には適用されない
Beijing Bo Tsing Tech Co.、Ltd.は知能化溶接ロボットを研究、開発、製造、販売を専門とするメーカーであり、溶接分野で国家レベルのハイテク企業を誇っています。2017年1月に北京に設立して以来、急速に発展してきました。研究開発センターのAnhui Bo Tsing Automation Tech Co., Ltd(安徽省)と生産拠点のBoqing Automation Technology Co.、Ltd(江蘇省)の子会社を設立しました。特に江蘇省の生産拠点は、3000平方メートルの広大な敷地面積を擁し、工場には2つの生産ラインを所有します。溶接ロボットの年間生産能力は500台を超えます。
Anhui Bo Tsing Automation Tech Co., Ltd. (Anhui Bo Tsing Automation Tech)
JiangSu Bo Tsing Automation Tech Co.,Ltd. (Jiangsu Bo Tsing Automation Tech)